SG.hu·
Hatalmas robotokra építenék a holdbázisokat
Érdekes megoldással állt elő a NASA a jövő holdbázisait illetően. Az építményt egy hatlábú robot tetejére helyeznék.
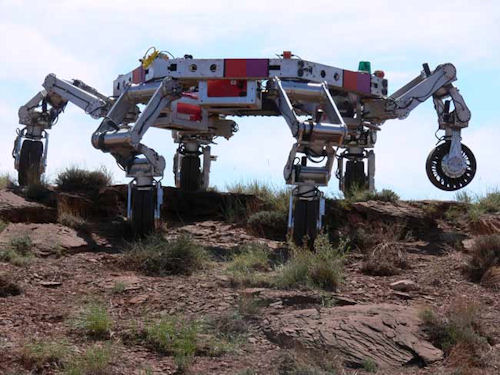
Az űrügynökség szerint az ATHLETE robot - ami a Terepjáró Hatlábú Földönkívüli Felderítő angol megfelelőjének mozaikszava - alapvető szerepet fog betölteni a bázisoknál. A 15 tonnás lakrész a robot segítségével szó szerint elsétálhat a leszállás helyszínéről. A 7,5 méter széles, lábaival együtt pedig több mint 6 méter hosszú robot, akár egy teknősbéka, a hátán bármely kívánt helyszínre eljuttathatja a holdexpedíció legénységét felszerelésestől, lakrészestől és laboratóriumostól együtt.
A NASA mérnökei szerint a rugalmas lábak alkalmasabbak a nehéz terepviszonyok között mint a kerekek, amivel szintén fel van szerelve a robot, tehát nem szükségszerű a járás. Ha a terepviszonyok engedik, akár gurulhat is a gép, ami ennek a megoldásnak köszönhetően 25%-os súlycsökkenést ért el a kizárólag guruló koncepciókkal szemben.
Az ATHLETE a tesztek során 35 fokos emelkedőkkel is megbirkózott, miközben a lakrészt hordozó része a lehetőségekhez mérten a lábak különböző mértékű nyújtásainak köszönhetően egészen kiegyenlített pozícióban maradt. A fenti adatok jó tapadás esetére vonatkoznak, csúszós körülmények között a robotlábak 25 fokos emelkedőig jutottak el.
A robotot irányíthatják közvetlenül az asztronauták, vagy távirányítással a földi irányítóközpont is. Bill Christensen szakújságíró, a SPACE.com és a Technovelgy.com szerkesztője egy harmadik megoldást tart a legjobb alternatívának, egy önműködő üzemmódot, amit a MER marsjárók szoftvere biztosítana a hatlábú robot számára. Hamarosan a NASA Sugárhajtómű Laboratóriuma meg is kezdi a szoftver és a robot közös tesztelését. A szerkezet sztereó kameráival ad háromdimenziós képet a fent ülők, vagy a Földön tartózkodók számára a navigáláshoz.
A robot napenergiát használ a mozgáshoz, legnagyobb sebessége óránkénti 10 kilométerre tehető. A nappanelek által begyűjtött energiát üzemanyag cellák tárolják el. A NASA mérnökei két prototípust tesztelnek és bár a sebesség nem tűnik nagynak, gyakorlatilag egy 5 km/h átlagsebességű mozgással nyolc nap alatt 1000 kilométert tehetnek meg. Ez egészen tekintélyes táv a 11 000 kilométer kerületű Hold esetében.
A fix pozíciójú holdbázis elvétől való eltérés jókora váltás lenne a NASA részéről. Az asztronauták egyfajta nomád életmódot folytathatnának, amivel sokkal nagyobb területet deríthetnének fel, mint egy helyhez kötött létesítménnyel. Ami azonban ennél is fontosabb, a robot jelentős segítség lehet számukra, ami maga is képes eszközök hordozására, összeszerelésére, működtetésére.
Az űrügynökség szerint az ATHLETE robot - ami a Terepjáró Hatlábú Földönkívüli Felderítő angol megfelelőjének mozaikszava - alapvető szerepet fog betölteni a bázisoknál. A 15 tonnás lakrész a robot segítségével szó szerint elsétálhat a leszállás helyszínéről. A 7,5 méter széles, lábaival együtt pedig több mint 6 méter hosszú robot, akár egy teknősbéka, a hátán bármely kívánt helyszínre eljuttathatja a holdexpedíció legénységét felszerelésestől, lakrészestől és laboratóriumostól együtt.
A NASA mérnökei szerint a rugalmas lábak alkalmasabbak a nehéz terepviszonyok között mint a kerekek, amivel szintén fel van szerelve a robot, tehát nem szükségszerű a járás. Ha a terepviszonyok engedik, akár gurulhat is a gép, ami ennek a megoldásnak köszönhetően 25%-os súlycsökkenést ért el a kizárólag guruló koncepciókkal szemben.
Az ATHLETE a tesztek során 35 fokos emelkedőkkel is megbirkózott, miközben a lakrészt hordozó része a lehetőségekhez mérten a lábak különböző mértékű nyújtásainak köszönhetően egészen kiegyenlített pozícióban maradt. A fenti adatok jó tapadás esetére vonatkoznak, csúszós körülmények között a robotlábak 25 fokos emelkedőig jutottak el.
A robotot irányíthatják közvetlenül az asztronauták, vagy távirányítással a földi irányítóközpont is. Bill Christensen szakújságíró, a SPACE.com és a Technovelgy.com szerkesztője egy harmadik megoldást tart a legjobb alternatívának, egy önműködő üzemmódot, amit a MER marsjárók szoftvere biztosítana a hatlábú robot számára. Hamarosan a NASA Sugárhajtómű Laboratóriuma meg is kezdi a szoftver és a robot közös tesztelését. A szerkezet sztereó kameráival ad háromdimenziós képet a fent ülők, vagy a Földön tartózkodók számára a navigáláshoz.
A robot napenergiát használ a mozgáshoz, legnagyobb sebessége óránkénti 10 kilométerre tehető. A nappanelek által begyűjtött energiát üzemanyag cellák tárolják el. A NASA mérnökei két prototípust tesztelnek és bár a sebesség nem tűnik nagynak, gyakorlatilag egy 5 km/h átlagsebességű mozgással nyolc nap alatt 1000 kilométert tehetnek meg. Ez egészen tekintélyes táv a 11 000 kilométer kerületű Hold esetében.
A fix pozíciójú holdbázis elvétől való eltérés jókora váltás lenne a NASA részéről. Az asztronauták egyfajta nomád életmódot folytathatnának, amivel sokkal nagyobb területet deríthetnének fel, mint egy helyhez kötött létesítménnyel. Ami azonban ennél is fontosabb, a robot jelentős segítség lehet számukra, ami maga is képes eszközök hordozására, összeszerelésére, működtetésére.